![]()
PIVとは|計測の原理やメリット・トレーサー粒子について解説
PIVとは? 計測の原理やメリット・トレーサー粒子について解説
PIVは、Particle Image Velocimetryの略で粒子画像流速測定法を意味します。流れ場における多点の瞬時速度を非接触で測ることができる流体計測法です。流れ場の空間的な構造を把握することができるため、流体を測定する手法として広く浸透しています。
PIVの原理
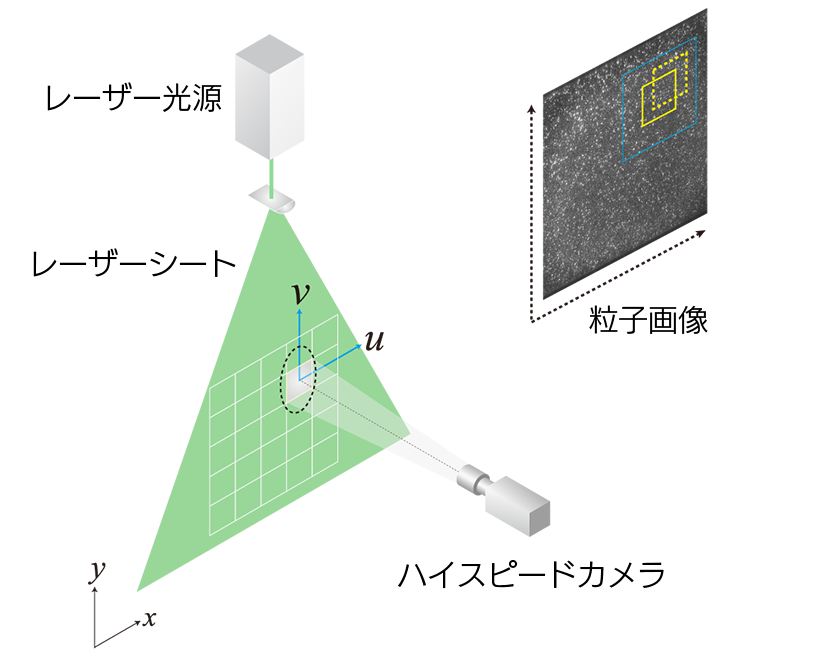
PIV2次元2成分(図1)
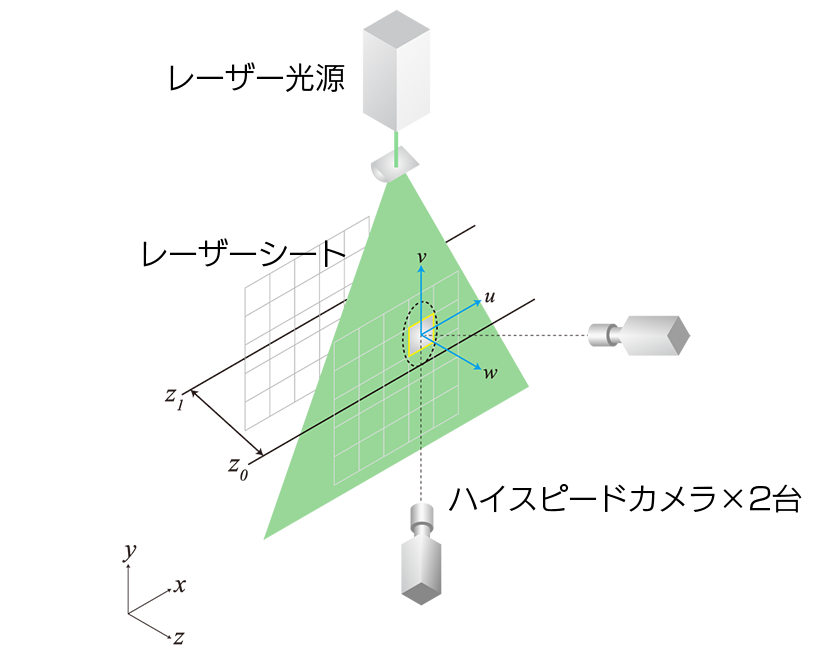
ステレオPIV2次元3成分(図2)
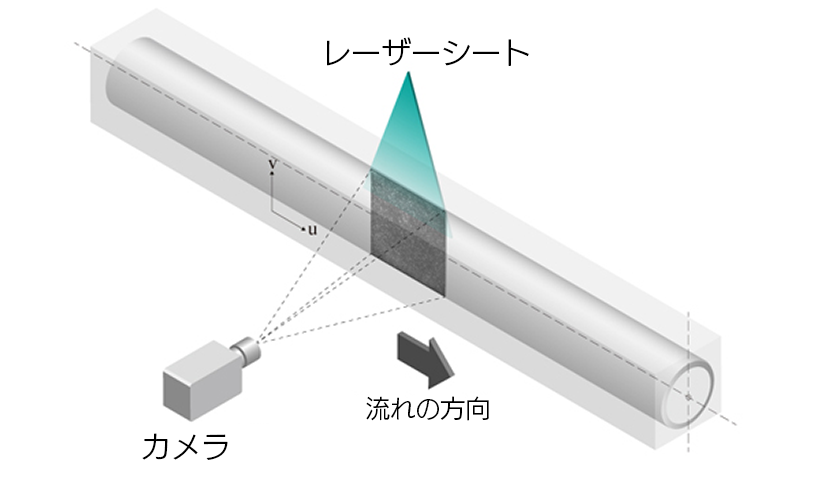
PIVでは、流体に追従する微小な粒子(トレーサー粒子)にレーザーシートを照射して流れを可視化します。これをカメラで撮影し、フレーム間の微小時間Δtにおけるトレーサー粒子の変位ベクトルΔxを画像処理によって求め、流体の局所速度ベクトルv≅Δx/Δtを算出します。
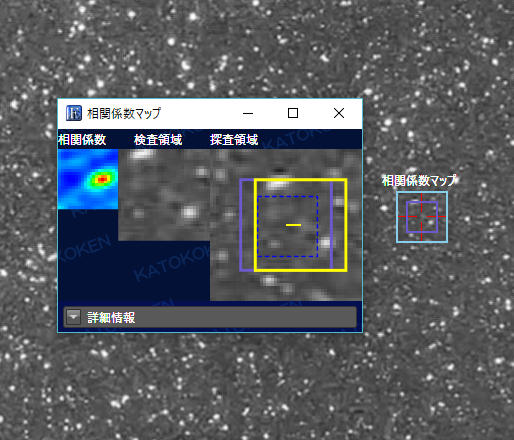
変位ベクトルの算出には、画像の中に微小な領域(検査領域)を設定し、輝度分布の相関関数を求めます。1時刻目と2時刻目の輝度分布を比較して、相関関数が最大値となる位置を移動先と推定する画像相関法で行います。
PIVの種類
PIVには、カメラ1台で計測する2次元2成分PIV(図1)と、カメラ2台を用いてステレオ撮影を行い、2次元平面の速度3成分を計測するステレオPIV(図2)があります。ハードウェアとしては、CW(連続発振)のレーザーシート光源を用いた時系列PIVやパルスレーザーを使用した逐次計測のPIVがあります。
PIVのトレーサーについて


トレーサー粒子の選定
トレーサー粒子の選定には下記の項目を考慮します。
- 流体への追従性(沈降速度、時定数:流体追従性の指標となる値)
- 光の散乱特性
- 粒子サイズ
- 条件によっては耐熱性
PIVでは計測対象となる流体に合わせてトレーサー粒子を選定します。
- 気体が計測対象の場合は煙やミストがよく使用されます。
- 液体の場合ではポリエチレン系や樹脂系の粒子がよく使われます。
また、特定の波長で蛍光する蛍光粒子も使われます。蛍光粒子は、蛍光する波長のみを透過するフィルタを通してカメラで撮影することで、PIV計測時の外乱となる壁面や気泡からの反射光を抑え、粒子像のみを捉えることができます。
計測対象となる流体に適切なトレーサー粒子を使用することで、誤差要因を減らすことができます。
PIVのメリット
非接触で流れを計測できる
PIVのメリットは非接触で流体の速度を測定できることです。これは流体中に粒子を散布し、レーザーシート光を用いて粒子の動きを捉えることで、流れに触れることなく速度情報を取得できるという意味になります。
非接触で測定できるメリットは、測定対象の流れに対して物理的な影響を与えないので、自然な状態の流れを対象とすることができます。特に微細な流れ構造や乱流の研究において重要な要素となります。
また、高温や高圧、有毒や腐食性のある流体など接触で計測を行う流速計では困難な環境下でも、PIVは適用可能であるため、幅広い研究分野において利用ができます。
高い時間分解能で計測できる
PIVでは、ハイスピードカメラを使用して粒子の動きを捉えることで、短い時間間隔で多くの画像を撮影することができます。そのため瞬時の速度データを大量に取得することが可能になります。これにより、流れの変化を細かく捉えることができ、時間的に解像度が高いデータが得られます。
この高い時間分解能は、乱流のような複雑で急速に変化する現象を研究する際に非常に有益です。乱流は不規則で短い時間スケールの変動が多く、十分な解像度で測定することが困難です。
しかし、PIVによって高い時間分解能で速度データを取得できるため、乱流の微細な構造やダイナミクスを正確に分析することができます。
速度場を計測できる
PIVでは、流体中の広範囲な速度場を同時に測定することができます。これにより、流れ全体の様子を把握することができ、局所的な特徴も詳細に調べることが可能です。広範囲な速度場を同時に測定できる特長は、さまざまな応用研究に役立ちます。
例えば、航空機を対象とした空気力学において、PIVを用いて翼周りの流れや胴体周りの流れを高い空間分解能で観測できます。このことから、抗力の低減や効率の向上を図ることができる設計の検討が可能となります。
流れの特性を把握できる
PIVで得られた速度データから、ポスト処理によりさまざまな流れの特性(例:渦度、レイノルズ応力、乱流エネルギーなど)を計算できます。流れのダイナミクスやエネルギー伝達、物質輸送などの現象を理解し、より効率的な技術開発につなげることができます。
欠点となるポイント
流れ場全体の速度ベクトルを求めることができるため、有用なデータが得られるPIVですが、欠点もあります。
計測対象となる流れ場に、トレーサー粒子が混入できなければ計測自体ができません。また、計測のダイナミックレンジもそれほど広くなく、流速の速い箇所と遅い箇所で差が大きい場合には、計測精度に誤差が生じる可能性があります。
PIVとPTVの違い
PIV|エアコンの気流
PTV|雪の挙動を計測(雪氷風洞)
PIV(Particle Image Velocimetry:粒子画像流速測定法)とPTV(Particle Tracking Velocimetry:粒子追跡法)は、それぞれ異なるアプローチを採用しています。PIVは、検査領域内の粒子群(通常5個以上の粒子像)の移動を解析することにより、流体の速度を計測する手法です。一方、PTVは個々の粒子の動きを直接追跡することで、流体の速度を測定します。
PIVは特定の時間差で撮影された2枚の画像を比較して、画像相関法により粒子の移動距離を計算し、相関係数を用いて速度ベクトルを求める手法です。対照的に、PTVは連続する画像フレームにおける個々の粒子の軌道を追跡し、その動きから速度を計算します。
PTVでは粒子一つ一つが計測対象となるため、微小スケールの乱れなど、高い空間解像度で計測したい場合に非常に有効です。壁面近傍などせん断が大きい場所の計測にも有効です。
PIVとPTVの特徴まとめ
| 特徴 | PIV | PTV |
| 手法 | 検査領域内の粒子群の動きを求める | 個々の粒子の動きを求める |
| 対象 | 粒子群(通常5個以上) | 個々の粒子 |
| 計測 | 連続する粒子画像を比較して相関から移動量を算出 | 連続する粒子画像から粒子を追跡して移動量を算出 |
| 適用 | 流れ場の全体像を瞬時に捉える | 壁面近傍などせん断が大きく複雑な流れの詳細を把握 |
| 長所 | ・広範囲の流れを把握できる ・渦度や速度勾配テンソルなど空間微分量を算出できる |
・粒子一つ一つが計測対象なので、高い空間分解能で測定が可能 |
| 短所 | ・計測の空間解像度がPTVに比べ低い ・速度変動を正確に捉えるには、検査領域を十分に小さくする必要がある ※検査領域を小さくすると誤ベクトルが増える可能性あります |
・トレーサー粒子が高密度になると計算コストが大きくなり、個々の粒子の追跡が難しい ・計測の準備や設定がPIVよりも難しくなることが多い |
PIVで測定できる主な項目
瞬時速度ベクトル
瞬時速度ベクトルは流体中の粒子の速さと方向を、ある瞬間において表す量です。
連続した2枚の画像から粒子の移動距離と時間をもとに、ある瞬間における流体の動きを示すベクトルです。
平均速度ベクトル
一定の期間に渡って測定された瞬時速度ベクトルの平均値です。流れの時間的な変動を考慮して、その期間における流れの代表的な速さと方向を表すベクトルです。
発散
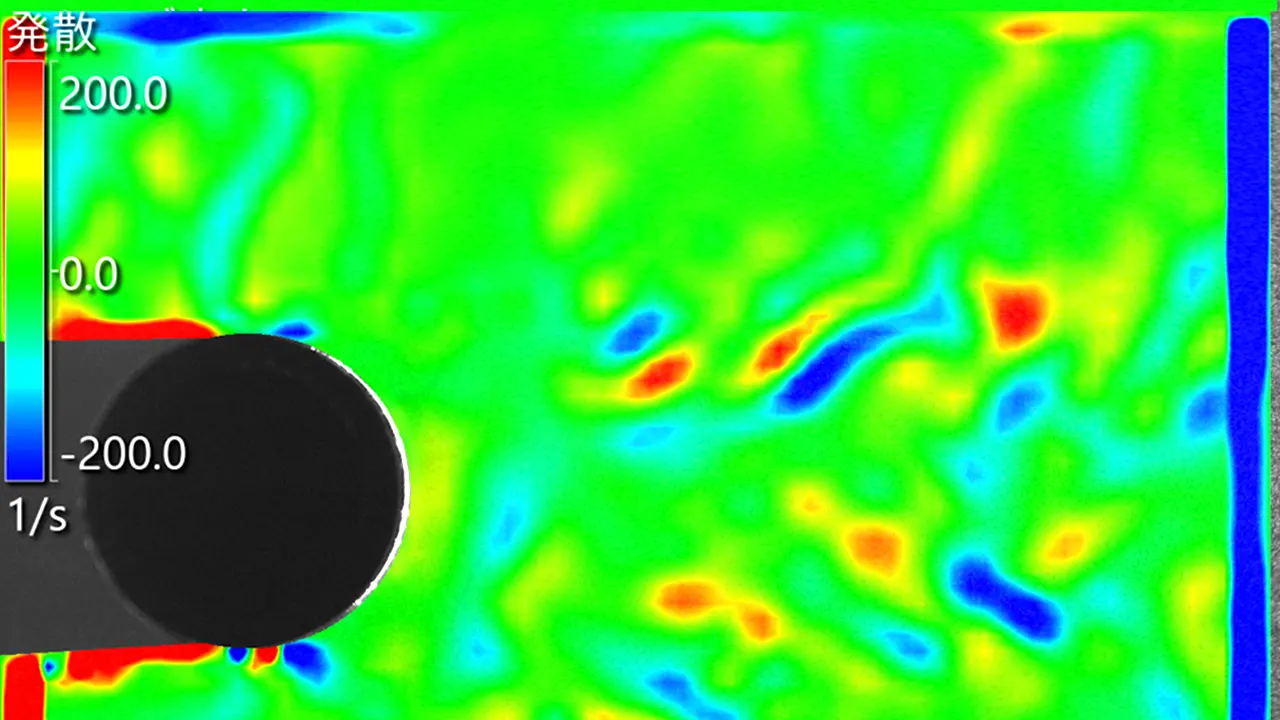
微小な体積から流体がどの程度湧き出しているかを表す量です。発散は、流れ場の安定性を判断する指標の一つです。発散が0の場合は、流れ場は安定しており、発散が大きくなるにつれて流れ場は不安定になります。
渦度
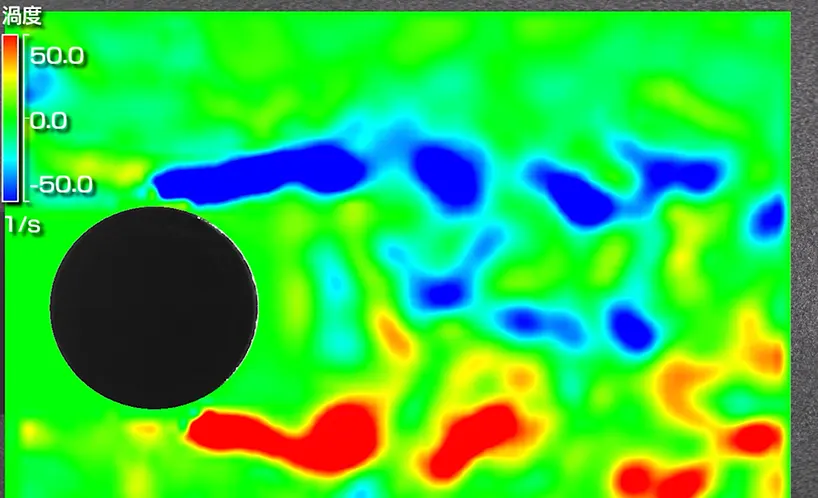
渦度は流れの回転性を表す量で、流体の回転運動の強さを評価するために使用されます。PIVで得られた速度ベクトルから渦度を求めることができます。
渦度が分かると流れの安定性、乱流の発生メカニズム、渦と流れの相互作用など、流体の特性について研究することができます。航空機の空気力学や水流の制御、環境工学などの様々な工学分野で活用されています。
レイノルズ応力
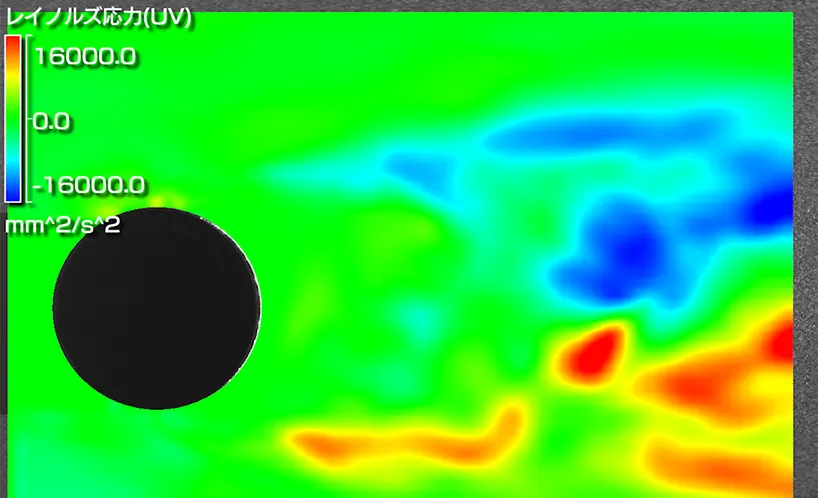
乱流における流体粒子の速度変動によって生じる応力成分を表す物理量です。乱流は不規則な速度変動を伴うため、流れの構造に応力が発生します。ここで発生した応力は流体の運動に影響を与え、エネルギー伝達や渦生成、物質輸送などの現象に関与しています。
レイノルズ応力は、乱流の特性やエネルギー伝達メカニズム、流れの安定性などを理解する上で重要です。
乱流エネルギー
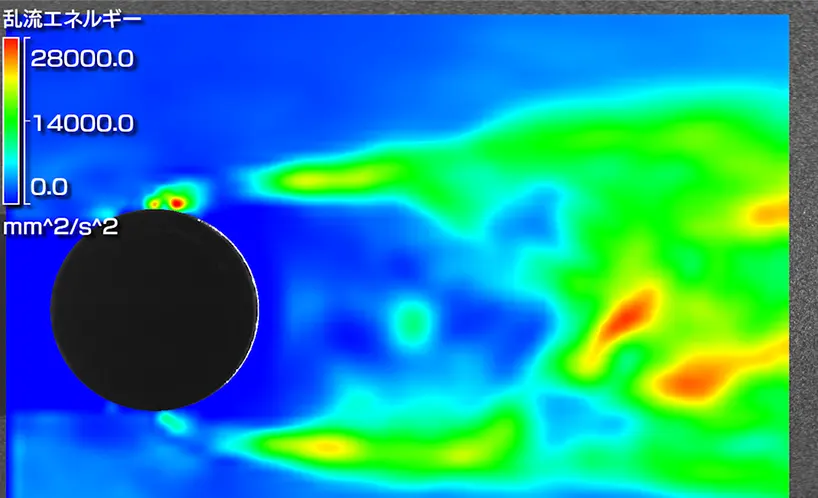
乱流における速度変動のエネルギーを表します。乱れの強度や流れの特性を評価する上で重要なパラメータです。
乱流エネルギーを求めることで、流れ中でのエネルギー伝達や散逸のメカニズムの理解に役立ちます。乱流エネルギーを知ることは、乱流の制御やエネルギー効率の向上につながります。
散逸
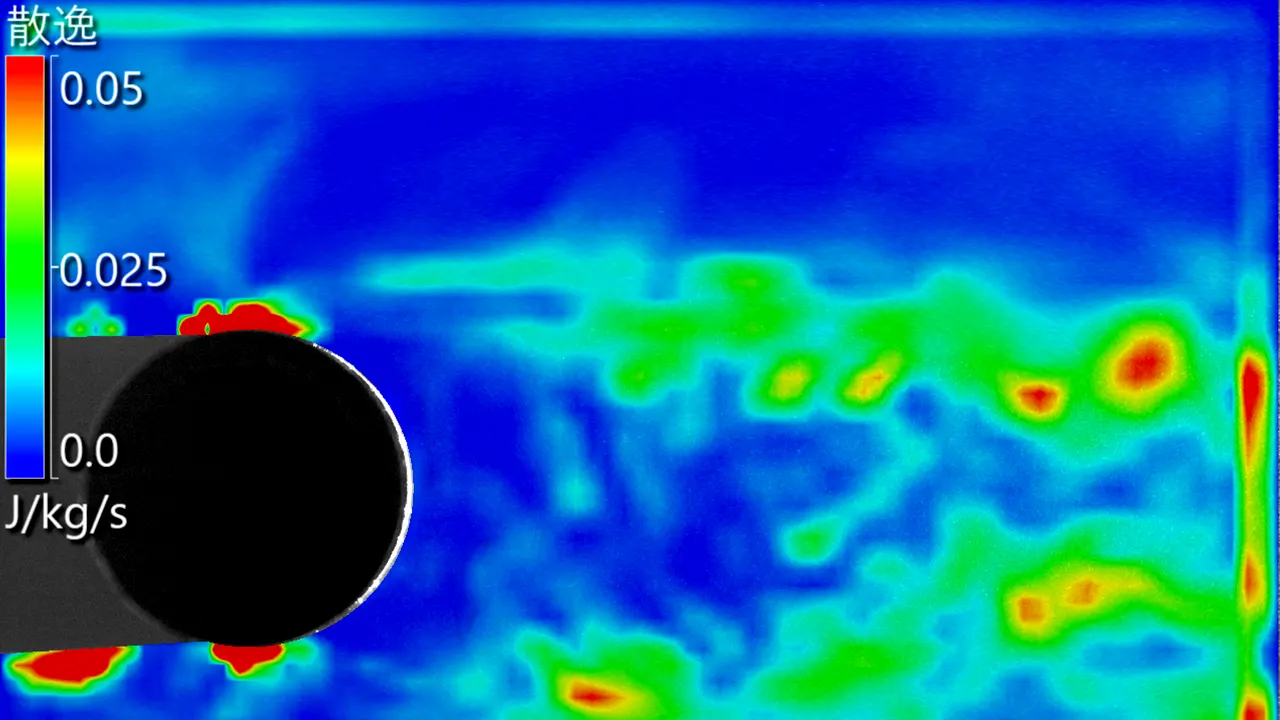
散逸は流体運動に伴いエネルギーが失われる現象のことを指します。具体的には、粘性摩擦や熱伝導によって、流体の運動エネルギーが熱エネルギーに変換される過程を指します。
パワースペクトル密度
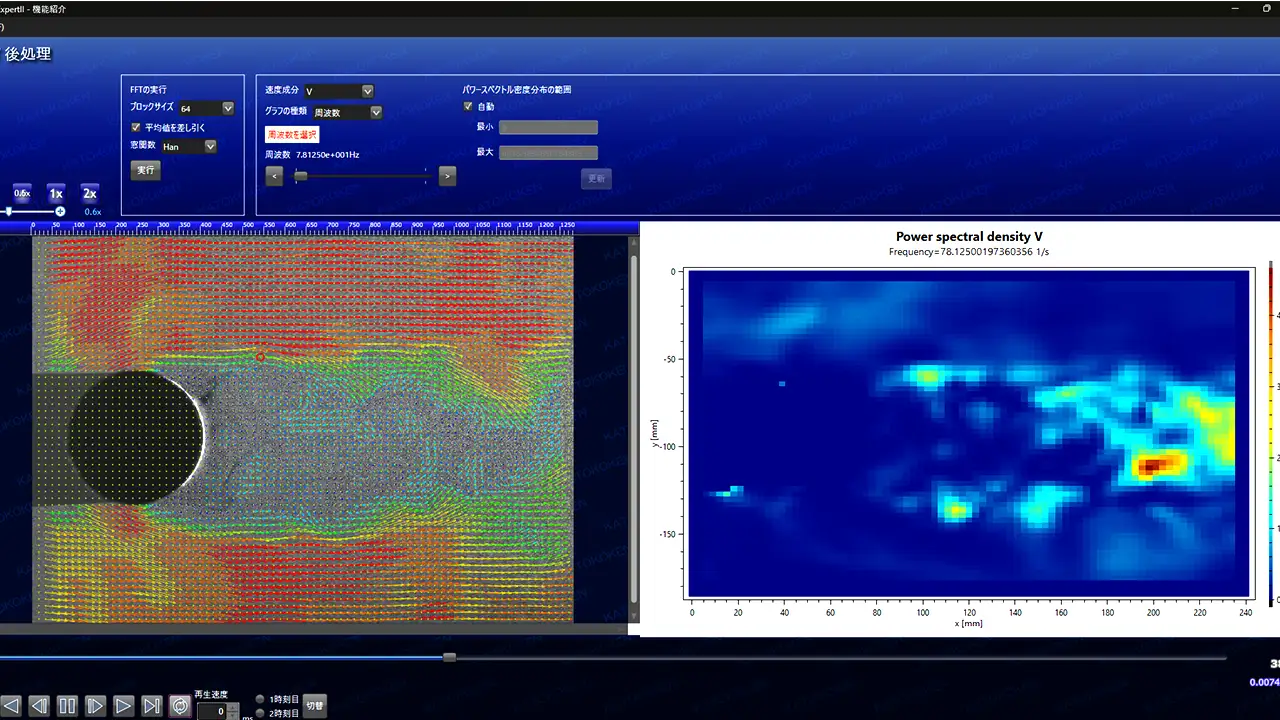
FFT(高速フーリエ変換)で得られるパワースペクトル密度は、乱流のエネルギーが各周波数成分にどれだけ分布しているかを示す重要な指標です。言い換えると、乱流の持つエネルギーの周波数ごとの強さを分析できるということを意味します。
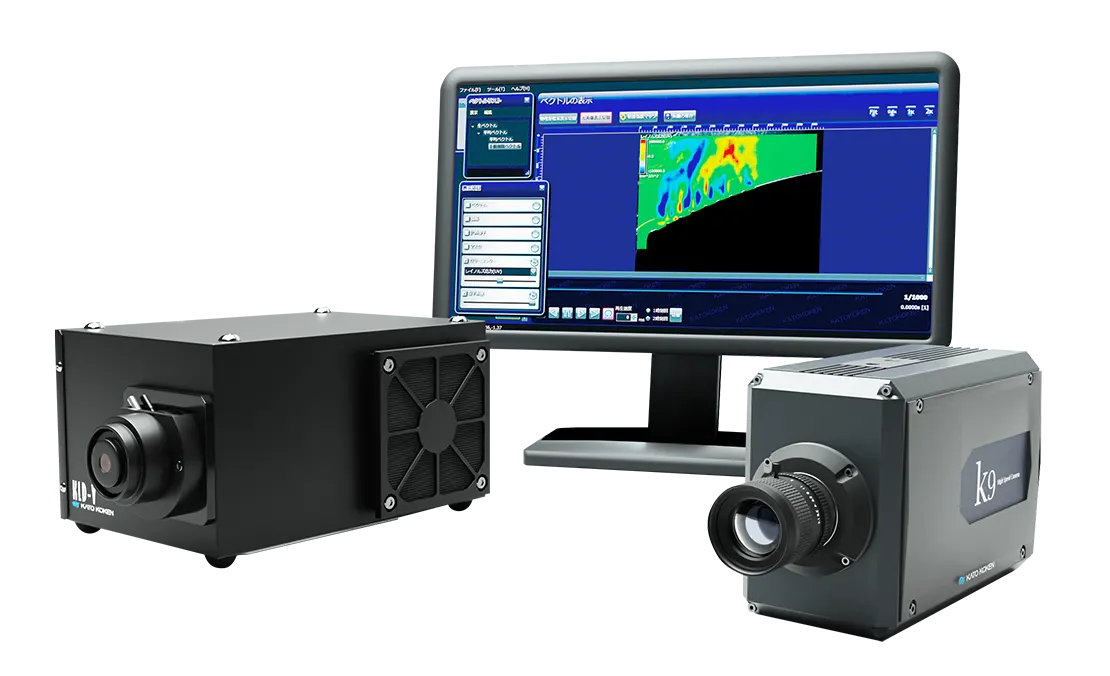
PIVシステム2D2C(2次元2成分PIV)
非接触で2次元断面の速度(U,V)を算出
流速計では観測空間に接触して1点で1成分計測になるのに対し、PIVでは非接触で2次元断面のエリア2成分(X, Y)の速度評価を時系列で行うことができます。CW(連続発振)レーザーシート光源とハイスピードカメラを組み合わせることで、従来のダブルパルスレーザーによる構成よりも扱いやすく…製品ページを見る
PIVの計測事例
円管内乱流のPIV(数値流体との比較)
粒子画像提供:明治大学 理工学研究科 機械工学専攻 榊原 潤 先生
実験条件:
管直径:d=50mm
時間間隔:Δt=1.5ms
管断面平均速度:U_bulk=542mm/s(電磁流量計による測定)
水温:20℃
レイノルズ数:Re=27019
管摩擦係数:λ=0.0247
摩擦速度:U_τ=30.10mm/s
粘性長さスケール:l_visc=0.0333mm
PIV計測結果とCFDの比較
円管内乱流のPIV計測イメージ
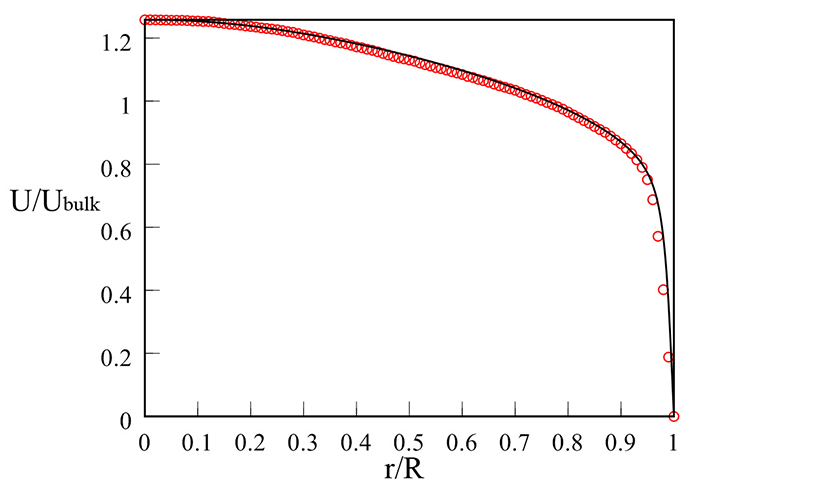
平均速度
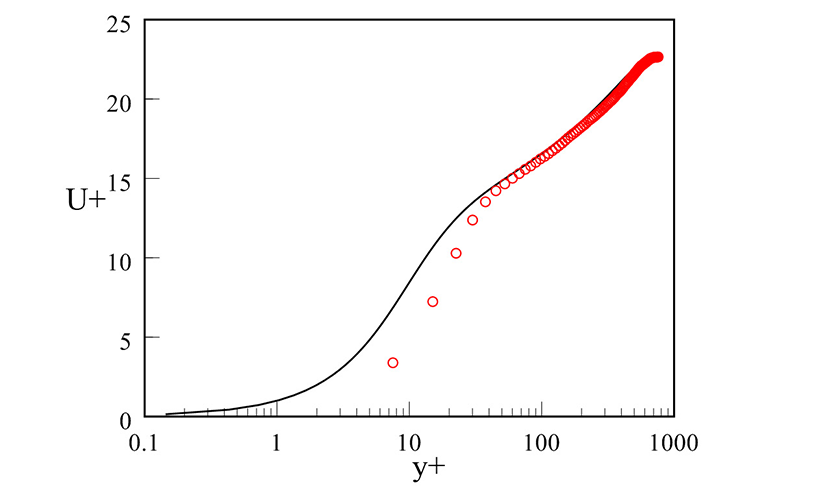
対数則速度分布
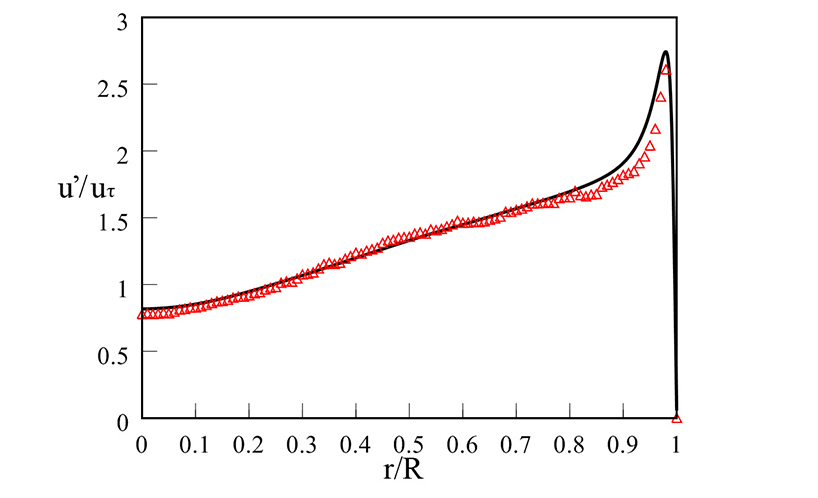
RMS速度
引用文献:実線(DNS)Wu, X. & Moin, P., J. 2008, Fluid Mech., 608, pp. 81-112. http://web.stanford.edu/group/ctr/research_data/pipe/re24k_statistics.txt
円管内流れの発達乱流を対象に、CFD(数値流体解析)の算出データとPIVによるデータの比較を行いました。CFDの算出データを実線、PIVのデータを赤印で表示しています。シミュレーションで導き出された結果と実際の流れを計測した結果とを比較し、その差異を確認・検証する用途で導入する事例が多くあります。
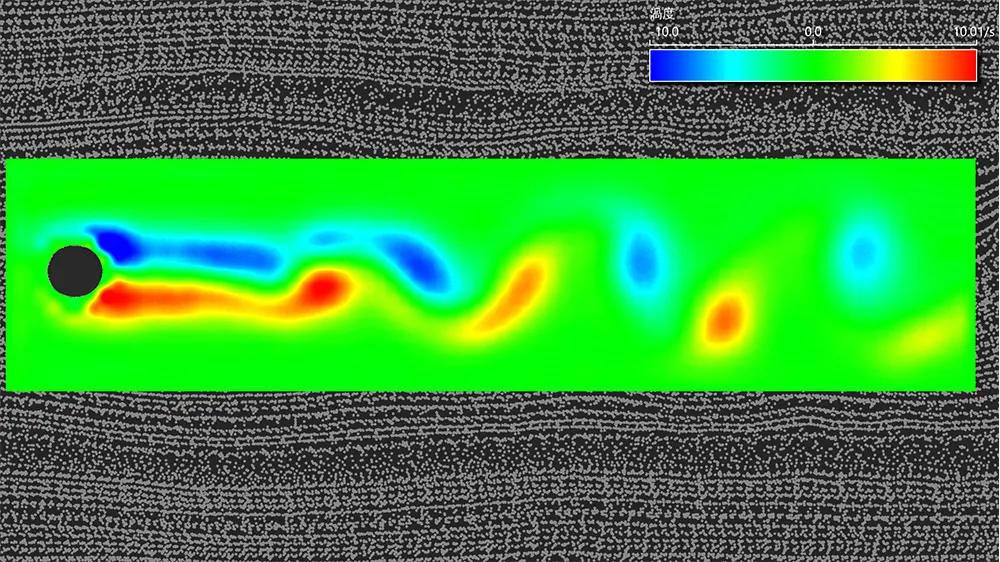
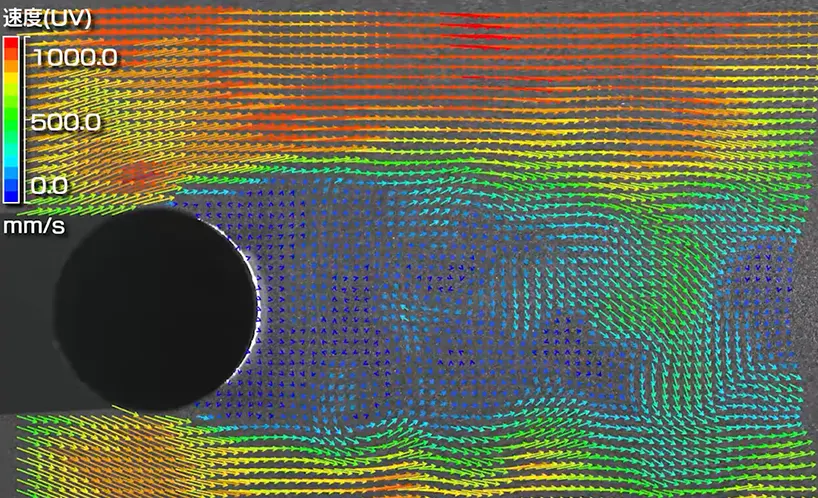
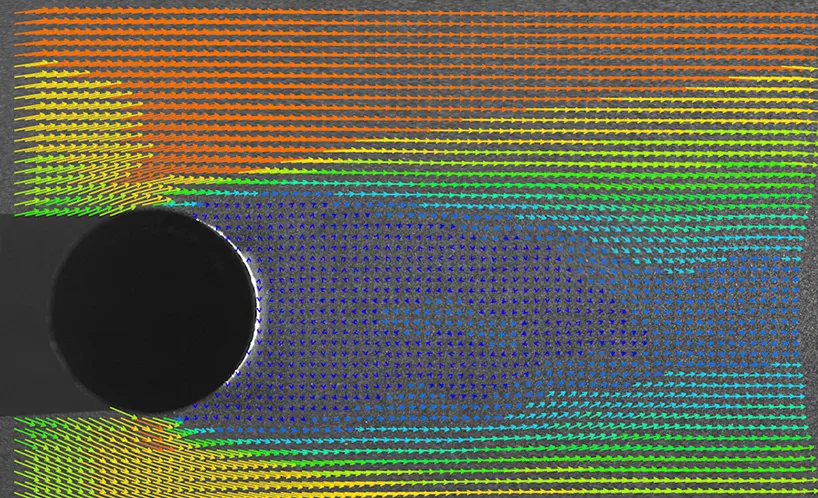
流体シミュレーション+CGで再現したカルマン渦のPIV
流体シミュレーションとCGを使って、障害物の後方でカルマン渦を発生させています(レイノルズ数 Re=105を想定) CGの流体にトレーサー粒子を追従させて、PIV計測を行いました。粒子の移動量から瞬時速度を算出し、渦度・速度分布を表示させています。
カルマン渦とは?
カルマン渦は、流体が障害物を通過する際にその後方で発生する定期的な渦の列のことです。この現象は、流体力学において重要で、交互に現れる渦のパターンを特徴とします。
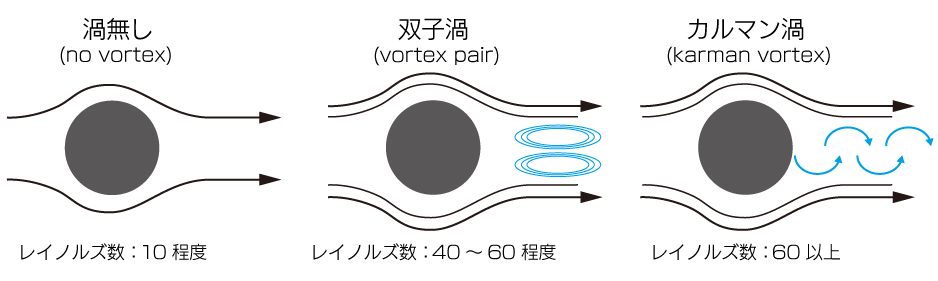
圧縮性が無く一様な流れ場を想定した時、障害物後方の流れはレイノルズ数によってふるまいが決まります。流れが遅くレイノルズ数が小さい(Re=10程度)時には渦は発生しません。だんだんと流れが速くなる(レイノルズ数大きくなる)につれて「双子渦」→「カルマン渦」へとふるまいが変化していきます。渦は反時計回り、時計回りと交互に出現していきます。
カルマン渦は、私たちの身近な所でも多く発生していて、規則的に交互に出現する渦によって旗がバタバタとなびいたり、野球のナックルボール、サッカーの無回転シュートでボールを揺らしたりしています。
こちらで詳しく解説しています。
カルマン渦とは|発生の原理から可視化事例を紹介
円柱後方の流れ(PIVとシミュレーション比較)
粒子法の一つSPH (Smoothed Particle Hydrodynamics)法で同じ条件を再現してPIVの算出結果と比較しています。流体現象の研究では、まずCFD(Computer Fluid Dynamics)により算出された計算結果に対して、「実際の流れではどうなのか?」という問いが付随します。それに対して、再現実験で実測を算出し結果と傾向を比較し証明することが、PIVの目的の一つになります。
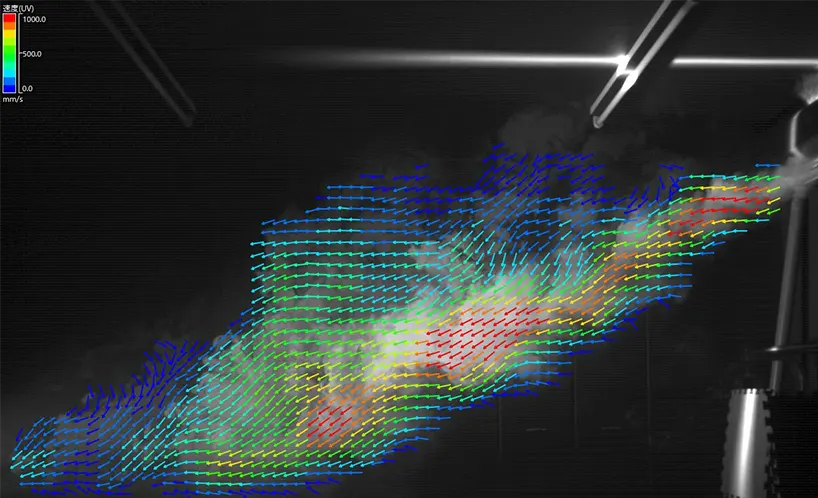
コアンダ効果をPIVで検証
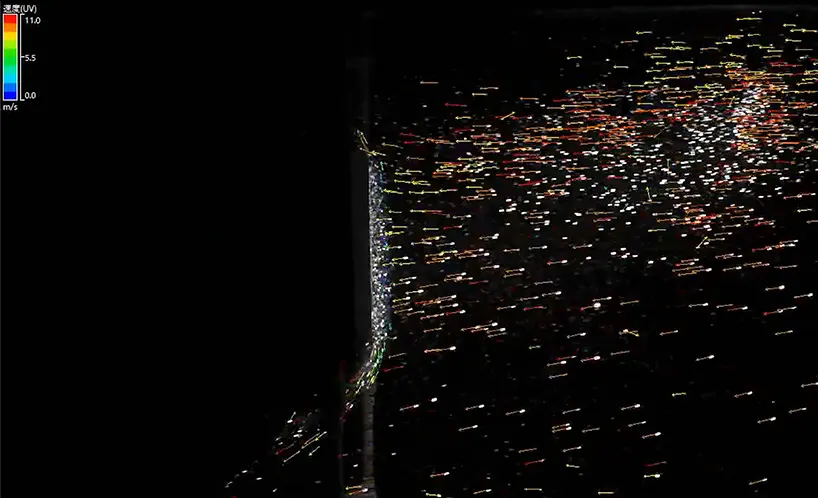
コアンダ効果の検証実験として、円柱に煙(トレーサー粒子)を吹き付けます。レーザーシート光源を用いて可視化を行い、ハイスピードカメラで撮影しました。撮影した映像を対象にPIVで計測して、瞬時速度ベクトル・流線を算出しています。PIVを行うことで、流体が円柱に沿って曲げられている様子を捉え、コアンダ効果の働きを分析することができます。
コアンダ効果とは?
コアンダ効果は、流体が近くの曲面に沿って流れる傾向を示す現象です。流体が物体表面に沿って曲がり、その物体に「くっつく」ように流れる様子を指します。
流体が物体の表面に近づくと、表面と流体の間の摩擦でその面に沿って流れようとします。また、曲面を通過する際に生じる圧力差がこのコアンダ効果をより強化します。曲面側では流れが加速するため圧力が下がり、流体を曲面に引き寄せそる力が働きます。結果、物体にくっついたような流れとなります。
コアンダ効果は、さまざまな工学分野や応用技術で利用されており、航空機、自動車、空調システムなど多くの分野で応用されています。航空機の翼では、コアンダ効果を利用して揚力を向上させることができます。翼の上部の表面が湾曲しているため、空気が翼の上部に沿って流れる際にコアンダ効果が働きます。
自動車業界でも、コアンダ効果は空気抵抗の低減やダウンフォースの生成に利用されています。車体の形状が工夫されていることで、空気がスムーズに流れるようになり、燃費向上や安定した走行性能が実現されています。
こちらで詳しく解説しています。
コアンダ効果とは|原理や事例を紹介
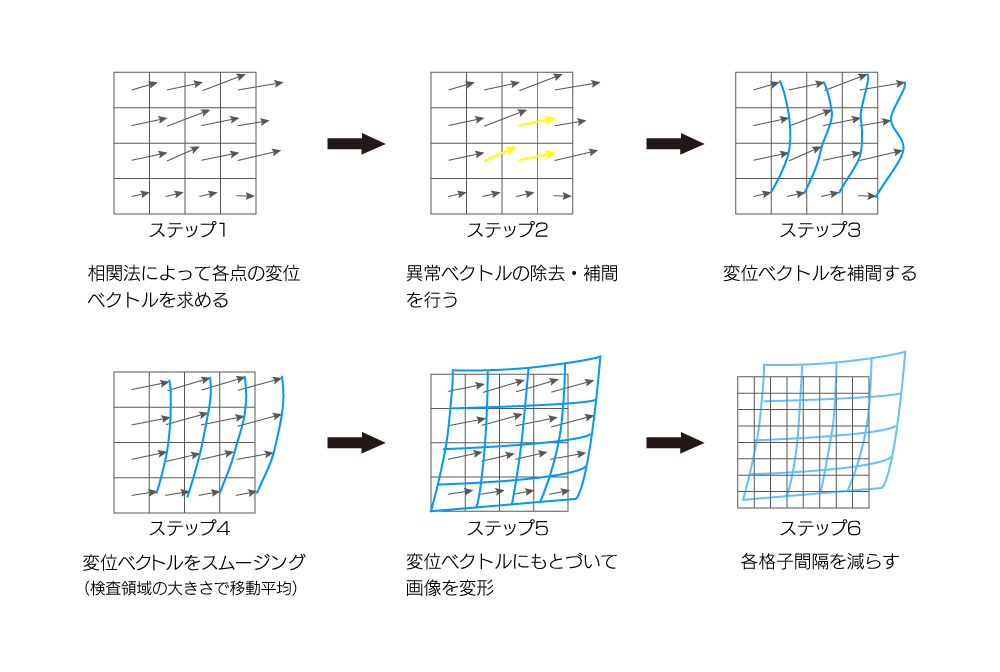
PIVのアルゴリズム(相互相関法)
(a)
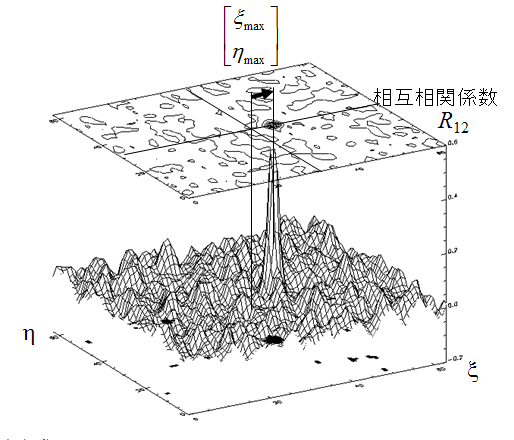
(b)
相互相関法によるPIVでは、時間的に連続した2画像を得た上で、その1時刻目の画像における微小な領域(検査領域、通常32x32px画素程度)内の輝度値分布と2時刻目の画像における領域(探査領域)内の輝度値分布(a)との相互相関関数を求め、その最大値となる変位を検査領域内の粒子群の平均変位ベクトルとして推定します(b)
ここで、相関関数の最大値は常に真の変位に対応するとは限りません。これは検査領域内の粒子が少ない場合や、レーザシート内外への粒子の出入りなどにより、対応する粒子が消失、またはせん断によって粒子パタンが変化することなどに起因します。
そこで、画面全体の相関係数分布を探した後に、各計測点の周囲の変位ベクトルの平均あるいはメディアンに最も近い、相関係数極大値(最大値とは限らない)を計測点の新しい変位ベクトルとして置き換える方法が採られます。
直接相互相関法とFFT(高速フーリエ変換)
変位を求める際の相互相関関数は、相互相関関数は直接相互相関またはFFT(高速フーリエ変換)を用いて計算されますが、前者は探査領域を自由に設定でき、計算負荷は高くなります。後者は計算負荷が低いですが、検査領域と探査領域の大きさが等しく、片方が周期境界を有するように演算されるため、移動量が大きくなると対応する粒子が消失し、測定精度が低下します。
これを避けるために、相関演算において得られた変位分だけ探査領域を移動し、再度相関演算を行うwindow offsetが用いられます。さらに、検査領域と探査領域を計測点に対して対称に移動すれば、変位が中心差分として求められるので、速度が二次精度で計算できるようになります。
FFTを用いる利点は直接相互相関に比較して演算が高速であることですが、両者が同一の結果を得るためには、FFTの検査領域を直接相互相関のそれよりも大きく取り周囲をゼロで埋める「ゼロパディング」を行う必要があるため、必ずしも高速とはなりません。
さらに、単純な繰り返し演算を得意とするGPU やCPUのSIMD命令セットを用いる場合には、メモリアクセスが煩雑なFFTよりも、演算が単純な直接相互相関の方が効率的に計算できます。従来では欧米を中心にFFTが使われることが多かったですが、近年では直接相互相関法が日本国内も含めPIVソフトに組み込まれていることが主流となっています。
PIVの精度
精度左右する要因
PIVの精度は多くの要因に依存します。これらには、使用するトレーサー粒子の選定、レーザーシートの厚みや均一性、カメラの解像度、解析ソフトウェアのアルゴリズム精度などが含まれます。
従って、システム全体の最適化が重要で実験条件や目的に応じたハードウェアのセッティング、正確なキャリブレーション作業が全体としての精度を高める上で重要になります。
サブピクセル補間
粒子移動量の算出は、通常±0.5ピクセルの誤差が含まれます(離散化されたデータのため)これは、5~10ピクセル程度の移動量に対して±5~10%の相対的な誤差を含むことになります。そこで精度向上のためにサブピクセル補間が用いられています。
サブピクセル補間を行うことで、画像上の粒子の位置をピクセル分解能能を超えて推定(0.1pixel)することができ、流体の微細な速度変動をより正確に把握することができます(後述:ピークロッキングの項でも説明しています)
PIVにおける検査領域の大きさと相関係数分布
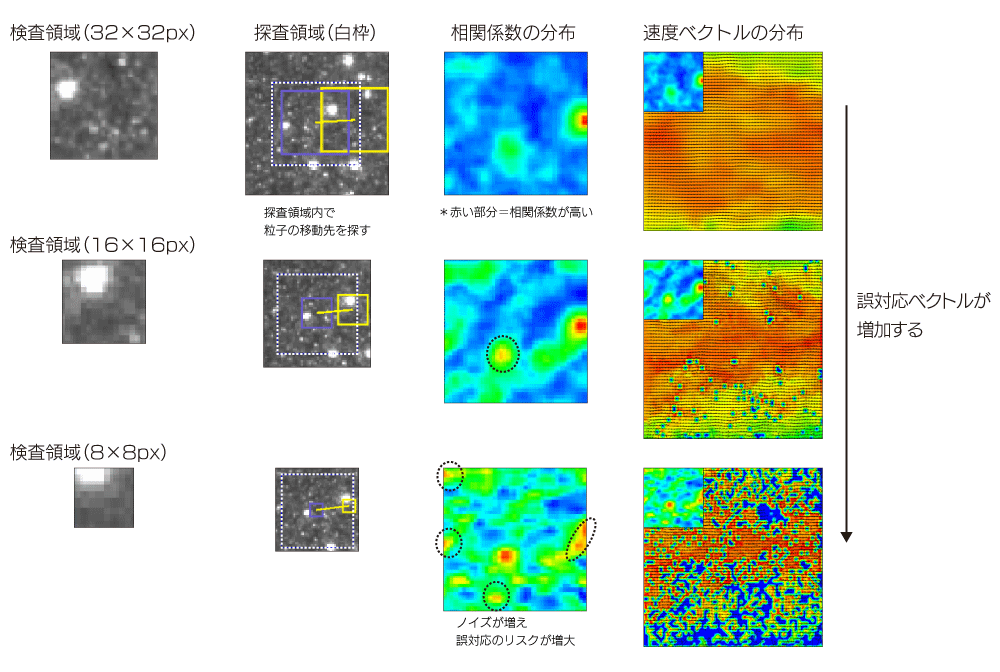
※検査領域が小さいと計測の空間解像度は向上するが、ノイズが増えて誤対応ベクトルが増加する
検査領域の大きさは、PIVの計測誤差に影響を与える重要な要因の一つです。具体的には、検査領域が小さいと空間解像度は向上しますが、ノイズの影響が増加しエラーが増える可能性があります。
一方、検査領域が大きい場合、空間解像度は低下しますが誤対応のリスクが減少し、全体的な精度は向上する可能性があります。大きな検査領域では、個々の粒子の影響が平均化され、ノイズや外れ値の影響が緩和されるため、より安定した計測結果が得られると考えられます。PIV計測を行う際には、目的や必要な解像度に応じて、適切な検査領域の大きさを選択することが重要です。
ピークロッキング|粒子移動量の算出誤差
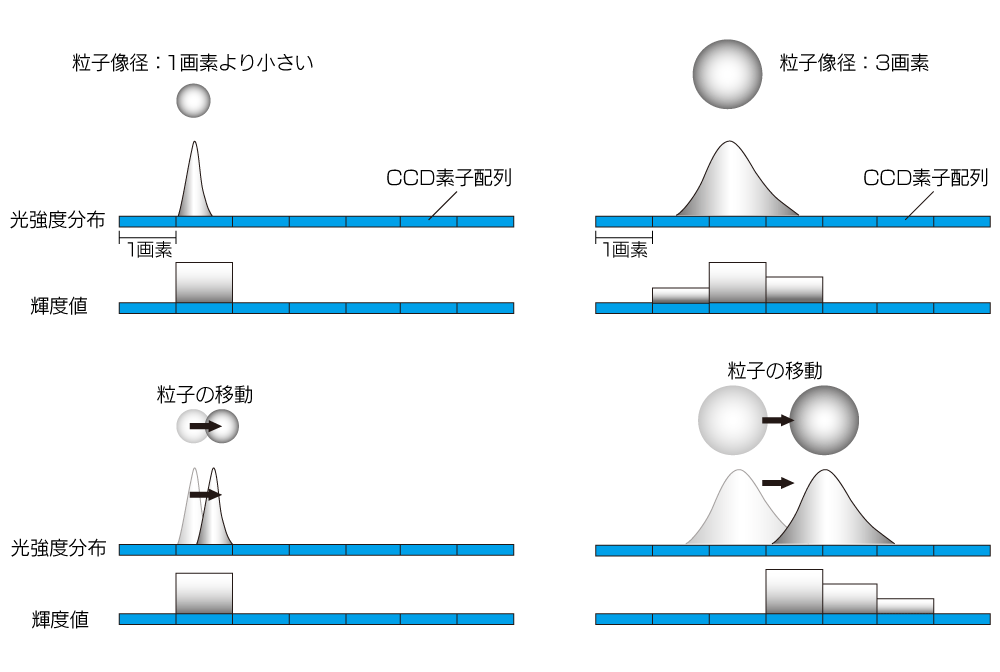
※粒子像径が1画素未満では、粒子のサブピクセル変位(0.1画素)を検出することはできない
相互相関関数は粒子画像と同様に空間的に離散化されているため、求められる変位ベクトルは±0.5画素の誤差を伴います。そこで、離散化された相関関数に2次元正規分布を内挿して連続関数とした上で変位ベクトルを求めることで、誤差を0.1画素程度に減少させる手法(サブピクセル補間)がとられます。
ただし、粒子像の大きさが約2画素を下回るときには真の変位量と推定される変位量の関係が線形にならず、粒子移動量の確率密度関数が整数移動量近傍で高くなり偏りが生じますので(ピークロッキング)、粒子像の大きさには十分注意する必要があります。
解像度の違いによるPIV計測への影響
PIVでは、精度を保つには撮影条件をどのようにすれば良いのか?各コンポーネントで構成のバランスを考える必要があります。そのため、カメラスペックのどこを重視するべきか、判断が難しい場合があります。
粒径が小さいトレーサー粒子でPIV計測を行うには、粒子の散乱光量が少なくなるため、カメラは高感度(明るい)であることが重要です。その他にも、どの解像度で撮影すれば良いのか?という質問を多く頂きます。そこで下記の動画では、同じカメラで解像度のみを変えて同じトレーサー粒子を撮影した場合の粒子像を比較しています。
カメラ解像度の違いによる粒子像の比較
200mm角の水槽を同じカメラで解像度だけ変えて撮影。
トレーサ粒子は数十μ程度のイオン交換樹脂を使っています。
画面左側の解像度は1920×1080px(フルHD)、右側は640×480px(VGA)となります。画像では、同じ現象を撮影しているにもかかわらず可視化されたトレーサー粒子の数が大きく異なります。
PIVでは、高い精度で粒子移動量を算出するために鮮明な粒子像を撮影する必要があります。そのため、撮影するカメラの感度は計測において重要な要素となります。また、感度と並び空間分解能も重要なパラメーターで、計測に必要な解像度がどの程度か?合わせて検討する必要があります。
高解像度タイプのハイスピードカメラは、高速度タイプと比較すると感度は悪くなることが一般的です。流体の微細な構造を把握するには、高い空間分解能の撮影が欠かせないため、感度の落ち込みによる視認性の低下を考慮して適切な撮影条件を決定していきます。

ハイスピードカメラ-製品ラインナップ
ハイスピードカメラの製品ラインナップ一覧です。人間の目では捉えきれない高速現象を克明に可視化し、解析ソフトウェアを組み合わせることで、様々な物理現象を数値化。ハイスピードカメラは研究開発・生産分野の発展...「ハイスピードカメラ製品ラインナップ」詳細ページ
PIVにおける誤ベクトル
誤ベクトルとは?
誤ベクトルとは、実際の流れを反映していない速度ベクトルのことを指します。周囲のベクトルと不連続であったり、物理的に不自然な方向・大きさを示したりするのが特徴です。
例えば
・流れが滑らかな場の中で、局所的に極端に大きな速度が現れる
・本来一方向に流れているにもかかわらず、逆向きのベクトルが出現する
といったケースが典型例です。
誤ベクトルが発生する原因
粒子の条件に起因する誤ベクトル
粒子数密度の不足:
検査領域内に含まれる粒子数が少ない場合、画像間で対応づけ可能な特徴量が不足し、相互相関関数のピークが不明瞭になります。その結果、ランダムノイズに近いピークが選択され、実際の流れを反映しない誤ベクトルが発生します。特に高空間分解能を狙って検査領域を小さくした場合に顕著です。
粒子の重なり:
粒子数密度が過剰になると、粒子像が重なり合い、個々の粒子の移動を正しく識別できなくなります。この状態では、相関ピークが広がったり複数化したりし、誤った移動量が選択される原因となります。過密条件はレーザー照明が強すぎる場合にも発生します。
輝度のばらつき:
粒子の輝度にばらつきがあると、特定の粒子像が相関計算に過度に影響し、実際の平均的な粒子移動を代表しないベクトルが算出されることがあります。特に発光粒子や反射粒子が混在する場合に注意が必要です。
流れ特性に起因する誤ベクトル
大きな速度勾配:
境界層、剥離点、噴流境界などでは、1つの検査窓内に大きく異なる速度を持つ粒子が混在します。この場合、「検査領域内で速度は一様」というPIV解析の前提が崩れ、相関ピークが歪むことで誤ベクトルが発生します。
強いせん断・渦の中心:
渦中心付近では粒子が回転運動を行うため、単純な並進移動としての相関が成立しにくくなります。その結果、ベクトルの方向や大きさにばらつきが生じ、誤ベクトルや欠損が発生しやすくなります。
時間条件(Δt設定)に起因する誤ベクトル
Δtが短すぎる:
粒子の移動量が1ピクセル以下になると、相関解析ではノイズ成分と移動量の区別が難しくなります。この状態では、サブピクセル補間誤差が顕在化し、ランダム性の高い誤ベクトルが増加します。
Δtが長すぎる:
粒子が検査窓外へ移動したり、回転・変形を伴った移動をすることで、画像間の対応関係が失われます。その結果、相関ピークが消失、あるいは誤ったピークが選択され、異常ベクトルが多発します。
解析の設定に起因する誤ベクトル
検査領域のサイズが不適切:
検査領域が大きすぎると空間平均化が過剰となり、小さすぎると相関信頼性が低下します。流れスケールと検査領域サイズの不一致は、誤ベクトルの直接的な原因となります。
単一サイズ解析:
単一サイズの検査領域で解析を行うと、速度勾配の影響を十分に補正できません。特に強いせん断場では、画像変形を行わない場合、誤ベクトルの発生率が高くなります。
誤ベクトルが解析結果に与える影響
誤ベクトルを含んだまま解析を進めると、
・渦度などの微分量が大きく乱れる
・圧力推定や力推定において非現実的な結果を生む
・時系列解析でノイズ的な変動が増幅される
といった問題が生じ、解析の信頼性が大きく損なわれます。
誤ベクトルを減らすためには
PIVにおける誤ベクトルの低減は、解析結果の信頼性を確保するうえで極めて重要です。誤ベクトル対策は、解析後のフィルタ処理だけで完結するものではなく、計測設計から解析設定までを含めた総合的な取り組みが求められます。以下では、実務において特に重要となる観点を整理します。
計測設計段階での対策
誤ベクトルの多くは、解析以前の撮像条件・計測条件に起因します。そのため、まず計測設計を最適化することが基本となります。
適切な粒子数密度の選定は最重要項目です。検査窓内に十分な粒子数が存在し、かつ粒子同士が重ならない密度を確保することで、相互相関の信頼性が大きく向上します。また、流れへの追従性を考慮し、粒子の慣性が無視できる条件を満たすことも重要です。
照明については、レーザーシートによる均一な照射を行い、背景ムラや輝度勾配を最小限に抑える必要があります。加えて、壁面反射や装置表面からのハレーションを抑制することで、粒子以外のノイズとなる信号が相関解析に影響するのを防ぎます。
撮像条件・時間設定の最適化
カメラ設定および時間間隔(Δt)の調整も、誤ベクトル低減に直結します。Δtは、粒子の移動量が10ピクセル程度となるよう設定するのが一般的であり、短すぎても長すぎても誤ベクトルの原因となります。
また、露光時間を適切に設定し、粒子像が過度にぼけないようにすることも重要です。S/N比を確保しつつ、粒子像が明瞭に分離されている状態を作ることで、相関ピークの信頼性が向上します。
解析手法・パラメータ設定の工夫
解析段階では、画像変形(Deformation:後述)PIVの活用が有効です。これにより、速度勾配の大きな領域でも相関精度が向上し、誤ベクトルの発生率を低減できます。検査領域サイズは、流れの空間スケールに合わせて適切に設定し、必要に応じてオーバーラップ率を高めることで、空間分解能と信頼性のバランスを取ります。
PIVの精度向上・高解像度化のための方法
CBC(Correlation-Based Correction)
流れのせん断により検査領域の粒子パタンに対して探査領域の粒子パタンが歪み、相関係数分布に明瞭なピークが現れない場合があります。例えば、相関係数極大部分の幅はせん断率が大きいほど広がり、極大値の位置検出精度は低下します。
その解決方法として、Correlation-Based Correction(CBC)が挙げられます。これは、計測点の近傍に互いに1/4程度重なり合う2つの検査領域を設け、それぞれの相関係数分布を求めた後、両者を乗算します。その結果、双方の同じ場所にあるピークは大きくなり、他のノイズピークは小さくなることでS/N比が上がります。また、極大部分はせん断の大きさによらず狭く、結果として計測精度が向上します。
再帰的相関法(Recursive method, Hierarchical method)
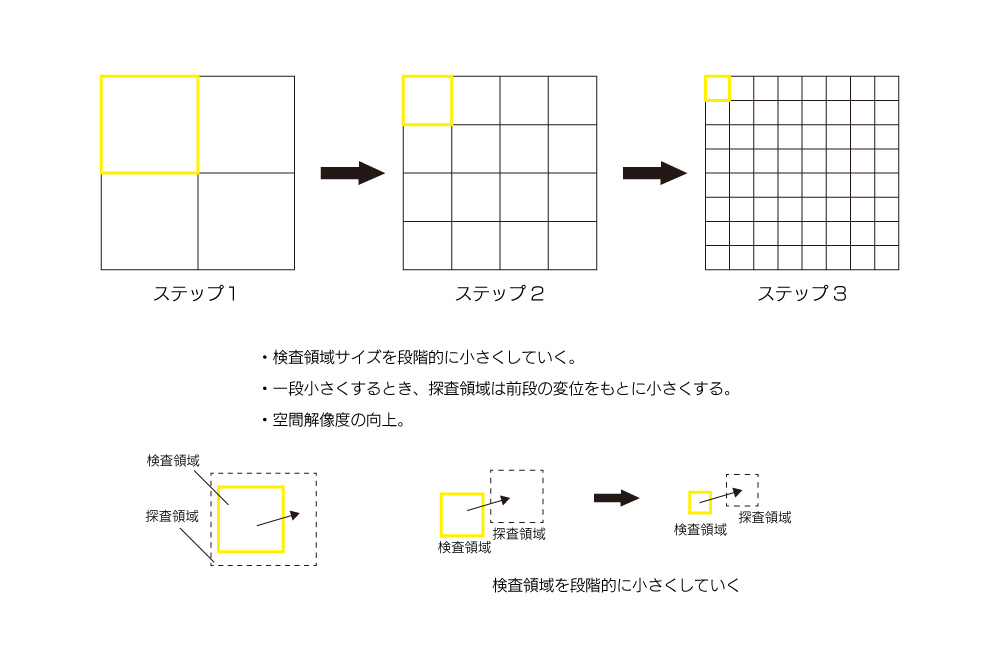
検査領域は有限な大きさであるため、その大きさよりも小さな渦運動を解像することはできません。例えば、空間方向に正弦波的に変動する流れが存在する場合に、計測される空間振幅が真の振幅の90%となる検査領域サイズは流れの変動波長の1/4程度であり、それ以下の波長の振幅はより過小に計測されます。
これは速度計測の精度を低下させる重大な要因であるとともに、渦度や速度勾配テンソルなどの空間微分量を求める際にも大きな誤差要因となり得ます。空間解像度を向上させるには、検査領域サイズを小さくすれば可能ですが、安易な検査領域サイズの減少は相関係数分布のS/N比を低下させ、正しい粒子対応付けを困難にします。
そこで、再帰的相関法(Recursive PIV)が提案されました。これは、32x32画素程度の検査領域で変位ベクトル分布を算出したのち、検査領域サイズを半分程度に減少させて再度変位ベクトル分布を求めます。このとき、2回目の処理の探査領域は初回に得られた変位ベクトルに従って小さくすることが可能であり、前述のCBCとの併用で粒子の誤った対応付けを相当減らすことができます。
反復画像変形法(Window deformation iterative multigrid)
検査領域と探査領域の間の粒子像の変形を無くすために、検査領域の粒子像を変形させて相関関数を求める方法もよく用いられます。画像全体の変位ベクトルを算出した後に、そのベクトル分布から局所的な歪みテンソルを求め、それに従って検査領域を変形して再度変位ベクトルを算出します。
これを繰り返すことでせん断の大きな流れも精度良く計測することが可能となります。前述の再帰的相関法と組み合わせて検査領域サイズを小さくしていけば空間解像度の向上も期待できます。
このアルゴリズムを反復画像変形法(Window deformation iterative multigrid:WIDIM ※旧名称:全画像変形法)といい、局所的な変形では無く、画像全体を変形する方法です。
例えば、第1時刻の画像を、初回に得られた変位ベクトル分布に従って局所的かつ全域的に変形して再度変位ベクトルを求めます。この操作を、変形された第1時刻の画像と元のままである第2時刻の画像が同一の画像になるまで、すなわち変位ベクトルがゼロになるまで繰り返せば、画像の変形量から直接粒子の変位が求められます。
しかしながら、この方法は繰り返し計算の途中で発生したエラーが伝播・増大する可能性があります。これを避けるため、各回の変位ベクトル分布を検査領域内で平均し、収束性を高める工夫が必要となります。
アンサンブル相関法(Ensemble Correlation)
検査領域サイズを究極的に小さくする場合には相関係数分布をアンサンブル平均する方法が採られます(アンサンブル相関法 Ensemble Correlation)検査領域サイズが小さくなると相関係数分布にノイズが増えますが、多時刻の画像から得られた多数の相関係数分布をアンサンブル平均すればランダムノイズは消失し極大ピークのみが得られます。
特徴をまとめると
- 検査領域サイズが小さくても精度よく移動量が求められる
- マイクロPIVの粒子のブラウン運動を排除できる
- 層流では効果的
- 乱流では、必ずしも平均速度が求まるとは限らない
- 平均速度は求まるが、瞬時速度は求まらない
などが挙げられます。
流れが層流であれば極めて高い解像度で速度分布を計測することができるようになります。乱流の場合には速度変動により平均相関係数分布の極大が広がると共に、速度確率密度分布の偏りに伴って非対称になり得るため、相関係数最大値位置が速度の平均値に一致することは保証されなくなります。
参考文献
森北出版株式会社・可視化情報学会(編)
『PIVハンドブック(第2版)』可視化情報学会(編)
詳しく解説された専門書になります。ご参考ください。
PIVについてよくある質問
- PIVに必要な機材は?
-
流体の2次元2成分のPIV計測には「PIVシステム2D2C」、ステレオ撮影による2次元3成分PIVは
「PIVシステム2D3C」が基本構成となります。その他、実験条件に応じて最適なご提案を
いたしますので詳細はお問い合わせください。
- トレーサー粒子の選び方は?
-
トレーサー粒子は流体に追従して球形であることが望ましいです。一般的には液相では
ポリスチレン粒子、気体では煙やミストが多く使用されます。計測対象となる流体によって
選定する必要があります。詳しくはお問い合わせください。
- PIVで計測できる範囲は?
-
PIVでは幅広い流速を計測することができます。マイクロスケールの低速流れから高速の流れまで
様々な条件で計測が可能です。具体的な計測可能範囲は、使用するハードウェアの性能に依存します。
詳しくはお問い合わせください。
- PIVはどういった分野で使われていますか?
-
PIVは、航空力学、燃焼研究、海洋学、生物流体力学、マイクロ流体力学など、多岐にわたる分野で
応用されています。特に航空機の翼やローターブレードの流れ、燃焼過程の詳細、海水の流れの解析、
血管内の血流、および微生物の運動研究など、幅広い研究領域で利用されています。
- PIVの欠点となるポイントは?
-
PIVでは測定対象となる流体にトレーサー粒子を混入できることが条件となります。トレーサー粒子が
使えない場合は、計測自体ができません。また、計測できる速度のダイナミックレンジが狭いため、
レイノルズ数の高い流れでは精度が低くなる可能性があります。
PIVに関連する資料・技術コラム
資料ダウンロード
【資料ダウンロード】プレゼンにも使える
「PIV入門ガイド|必要な機材から計測手順までわかりやすく解説」
「PIVって何?」「何ができるの?」「必要な機材は?」などこれからPIVをご検討されている方へ、大まかな概要を掴めるPIVの入門ガイドです。まずはPIVとはどういったものか?ざっくりと把握できます。PIVの入門ガイドをダウンロードする
【資料ダウンロード】プレゼンにも使える
「PIV計測で知っておくべき!トレーサー粒子の基礎知識」
PIVの計測精度に関わる重要なトレーサー粒子についてお調べですか?この資料では、トレーサー粒子を選ぶ時に注意するポイントや特徴をわかりやすく解説しています。まずはトレーサー粒子の概要をつかむのに最適です。トレーサー粒子の基礎知識をダウンロードする

【資料ダウンロード】プレゼンにも使える
「PIVで理解する流体の基本|発散と渦度の入門ガイド」
PIVで算出できる「発散」「渦度」についてお調べですか?この資料では、いまいち理解が難しいPIVの解析結果である発散と渦度について解説しています。発散と渦度を身近なものでイメージした場合や使われる場面などまずは、どういった物理量なのか?おおまかな概要を抑えることができます。発散と渦度の入門ガイドをダウンロードする
【資料ダウンロード】プレゼンにも使える
「PIVで理解する流体の基本|乱流エネルギーとレイノルズ応力の入門ガイド」
流体力学において重要なパラメータの「乱流エネルギー」「レイノルズ応力」についてお調べですか?この資料では、PIVで求める乱流エネルギーとレイノルズ応力について焦点を当てて、身近なものでイメージした場合や使われる場面など解説します。まずはどういった物理量なのか?おおまかな概要を抑えることができます。乱流エネルギーとレイノルズ応力の入門ガイドをダウンロードする
PIVの関連記事

【関連記事】
カルマン渦とは|発生の原理から可視化事例を紹介【技術コラム】
カルマン渦(Kármán vortex)は、流れ場に障害物を置いたとき、その後方で周期的かつ規則正しく発生する渦の列を指します。障害物の背後に形成されるこの渦列は、流体力学における代表的な後流構造の一つであり...「カルマン渦とは」の続きを読む

【関連記事】
気体・液体の流れを可視化【目的・用途別の可視化技術】
「気体や液体の流れを可視化する」とは、流体を見える化してカメラや目視で観察できるようにすることです。通常は目に見えない現象を可視化することで、シミュレーションでしか評価ができない観測対象を...「気体・液体の流れを可視化」続きを読む
【関連記事】
風洞|実験の目的から応用分野・可視化事例まで紹介【目的・用途別の可視化技術】
風洞とは人工的に発生させた空気の流れを利用して、物体に働く力やその周囲の空気の動きを精密に測定するための装置または施設です。大型のファンで空気を送り出し...「風洞|実験の目的から応用分野・可視化事例まで紹介」続きを読む

【関連記事】
コアンダ効果とは|原理や事例を紹介【技術コラム】
コアンダ効果(Coanda effect)は、流体力学における現象の一つで、流体(空気や水など)が曲面に沿って流れる際、その曲面に「引き寄せられる」ように振る舞う現象を指します。...「コアンダ効果とは」続きを読む
製品に関するお問い合わせや技術相談を当社スタッフがお受けいたします。
※お電話でも受け付けております。
☎0463-91-1281
9:00~18:00(土日祝日を除く)
関連製品

PIV Laser
GⅡseries
波長:520nm
緑色半導体レーザー

PIV Laser Fiber Spectra
波長:520nm
緑色半導体レーザーファイバー仕様

KLM-600FC
可視化用ルミネッセンス光源(超高出力イエロー光源)

ハイスピードカメラflux k-240
解像度1,280×1,024px時 1,000fps
最高撮影速度:40,000fps

ハイスピードカメラPhantom VEO series
解像度1,280×960px時 10,860fps

ハイスピードカメラ
ハイスピードカメラ製品ラインナップ

トレーサー粒子
気流用・液相用トレーサー粒子各種
製品のデモ、お見積りについてなどサポート全般のご紹介。

可視化や画像分析に役立つ計算を行います。

製品のサンプル動画と可視化事例のご紹介しています。